出现问题的原因:
由于机器人左右马达规格一致,所以生产时并未区分左右马达,所以可能出现两个马达旋转方向相同的情况出现(正常情况机器人前进时左右轮旋转方向相反)
解决方法:
您需要准备一根小螺丝刀或针,然后按下方视频步骤完成马达跳线:
1. M32大液晶屏主板——白色头马达
2. M32小液晶屏主板——黑色头马达
直接反接主板上的插头即可,如下图1、图2所示
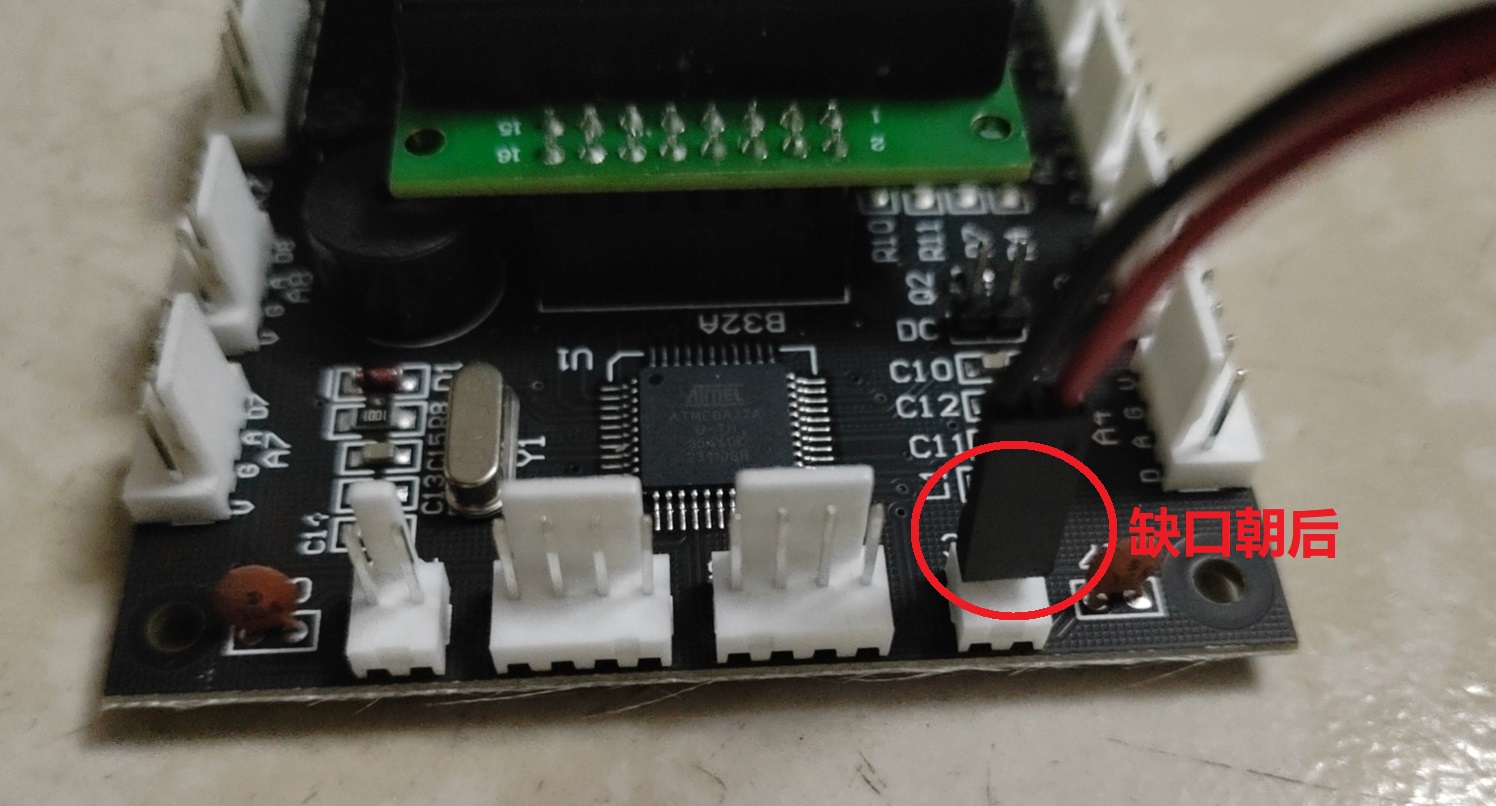
图1 反接前
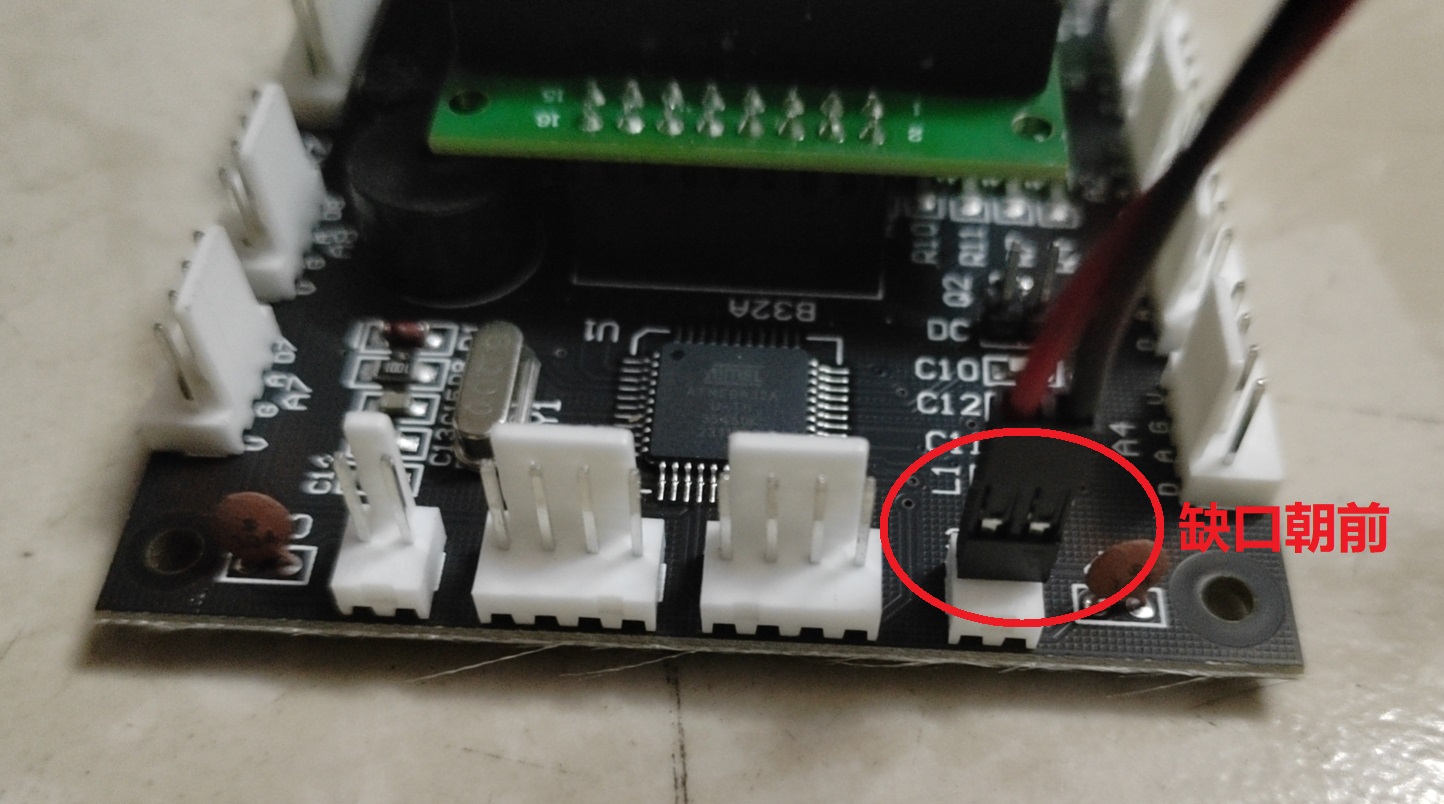
图2 反接后
由于机器人左右马达规格一致,所以生产时并未区分左右马达,所以可能出现两个马达旋转方向相同的情况出现(正常情况机器人前进时左右轮旋转方向相反)
您需要准备一根小螺丝刀或针,然后按下方视频步骤完成马达跳线:
1. M32大液晶屏主板——白色头马达
2. M32小液晶屏主板——黑色头马达
直接反接主板上的插头即可,如下图1、图2所示
图1 反接前
图2 反接后