在擂台赛和货物分拣机器中,需要安装机械臂。为了更好的编程控制夹子,我们需要知道夹子所在的角度。因此,一般我们先定一个初始角度90.在这个基础上去安装夹子。
步骤一:编程,设置夹子初始角度为90.
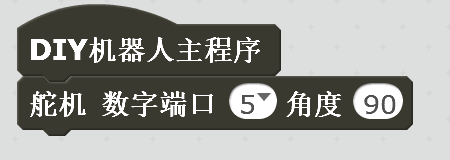
图1
把程序下载到机器人主板,按下开关,让舵机归位到90度。如图2所示

图2
插上一边夹子,让夹子处于中间状态,如图3所示
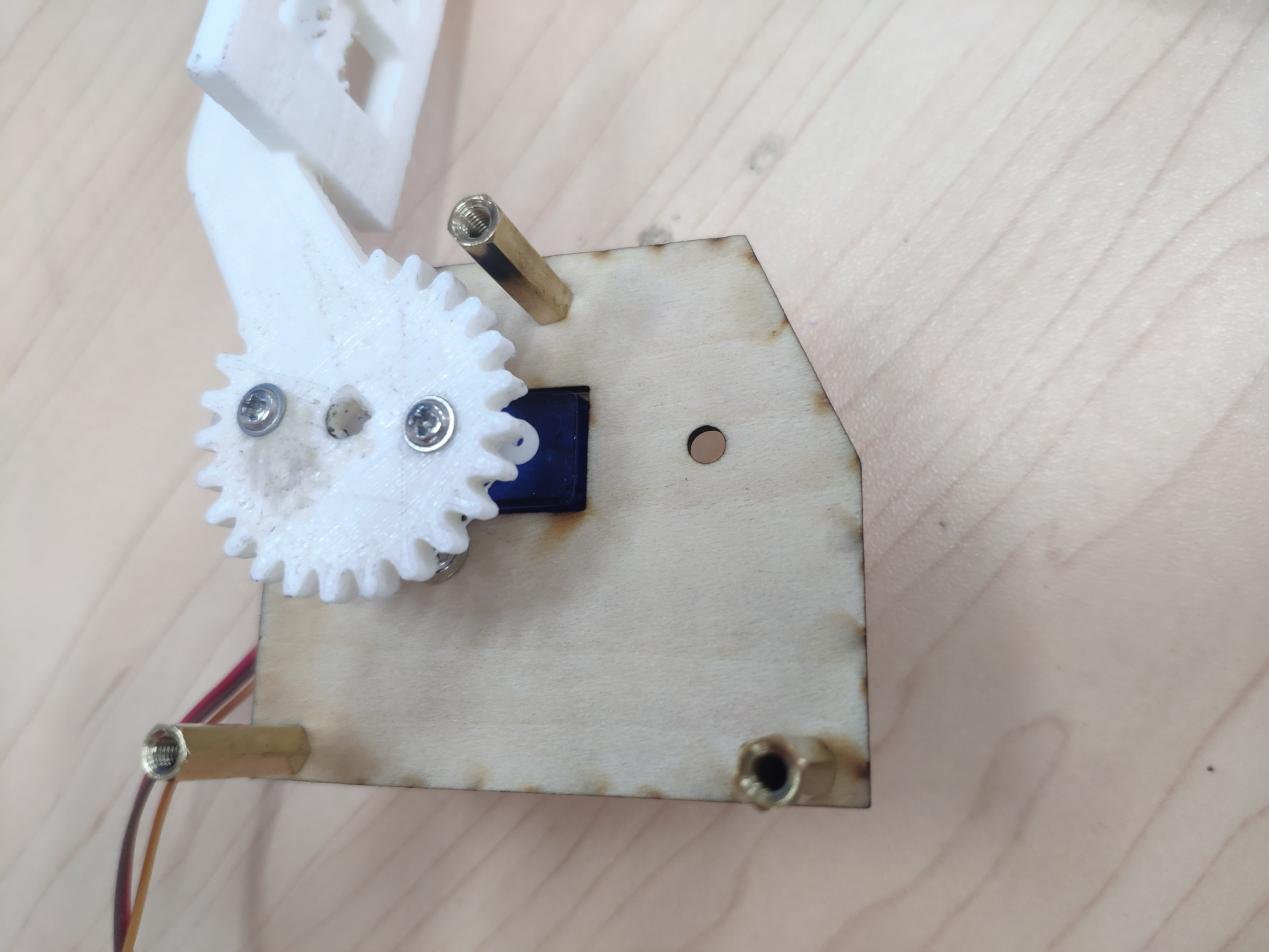
图3
再安装上另一边夹子,如图4,这样我们就知道夹子在夹住的状态是90度了。
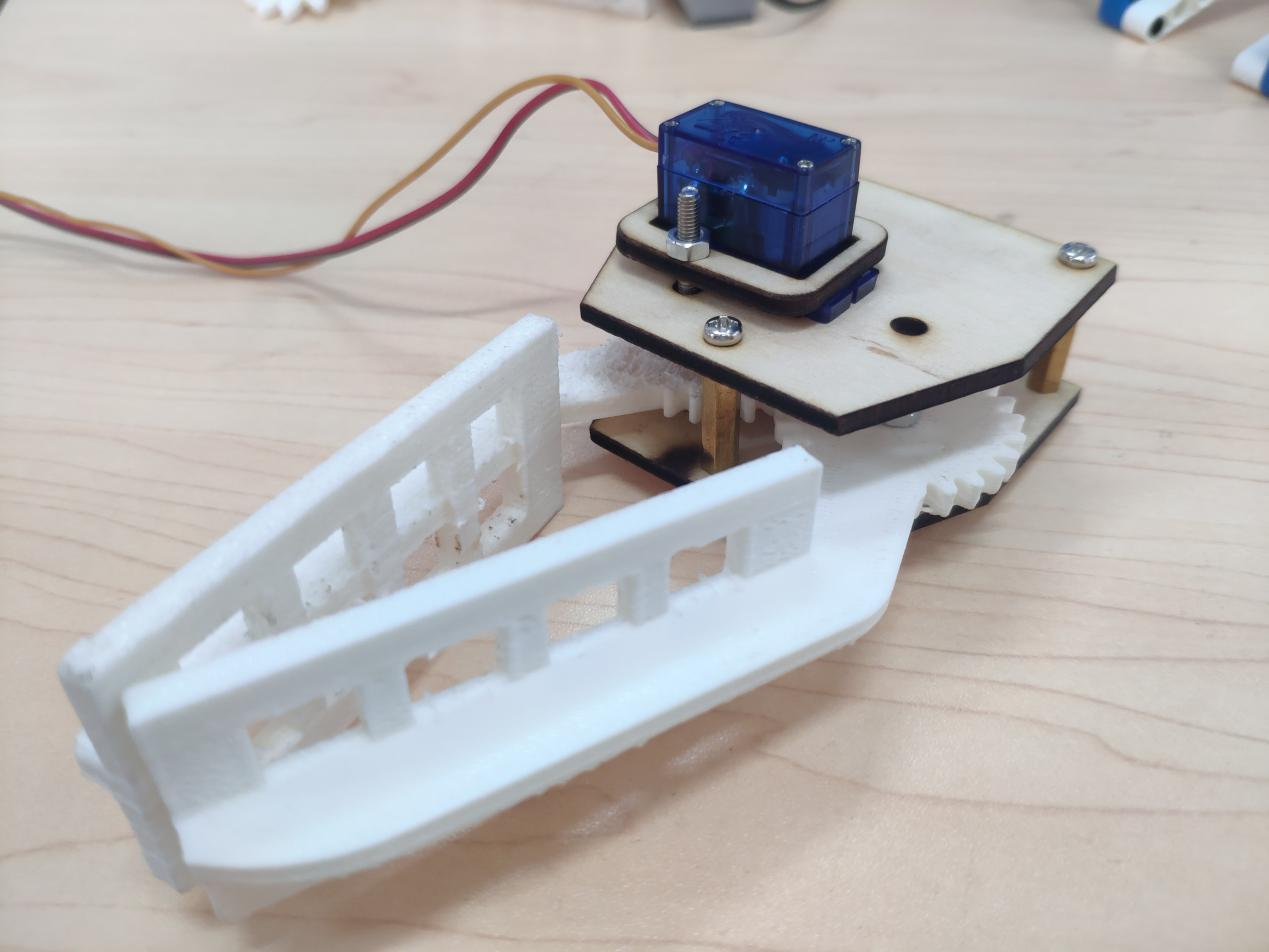
图4
后面就在这个夹子的状态下进行编程。夹住是90度,松开是130度.
在擂台赛和货物分拣机器中,需要安装机械臂。为了更好的编程控制夹子,我们需要知道夹子所在的角度。因此,一般我们先定一个初始角度90.在这个基础上去安装夹子。
步骤一:编程,设置夹子初始角度为90.
图1
把程序下载到机器人主板,按下开关,让舵机归位到90度。如图2所示
图2
插上一边夹子,让夹子处于中间状态,如图3所示
图3
再安装上另一边夹子,如图4,这样我们就知道夹子在夹住的状态是90度了。
图4
后面就在这个夹子的状态下进行编程。夹住是90度,松开是130度.